
 产品:47
产品:47
 联系我们
联系我们

1 新建一个项目
1)单击“项目”,打开左图所示项目菜单,单击“新建”,打开右图所示窗口

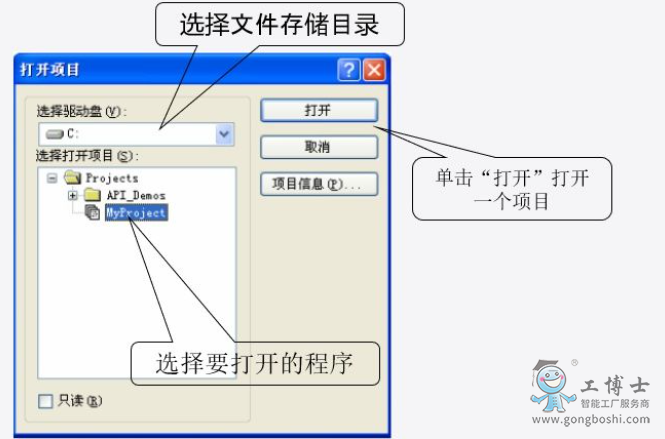
2 打开一个项目 (存储在电脑里程序文件)
1)单击“项目”,选择“打开”,打开下图图所示窗口
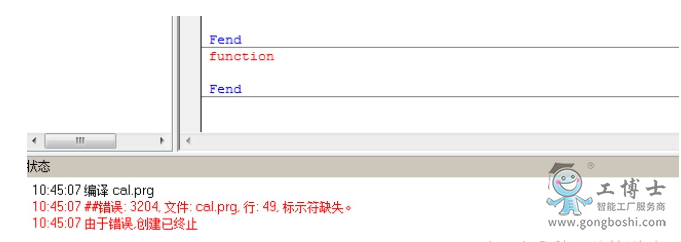
3 编译并下载程序
1)在工具栏上单击创建并下载程序图标“

”或者单击打开运行窗口图标
“

” ,软件即会编译程序,如果程序没有错误就会将程序下载到控
制器。如果程序有错误,状态栏会显示程序错误信息,如下图所示。将光
标移到错误信息一栏,双击左键光标即会跳到程序错误的那一行去,然后
修改程序后重新下载程序
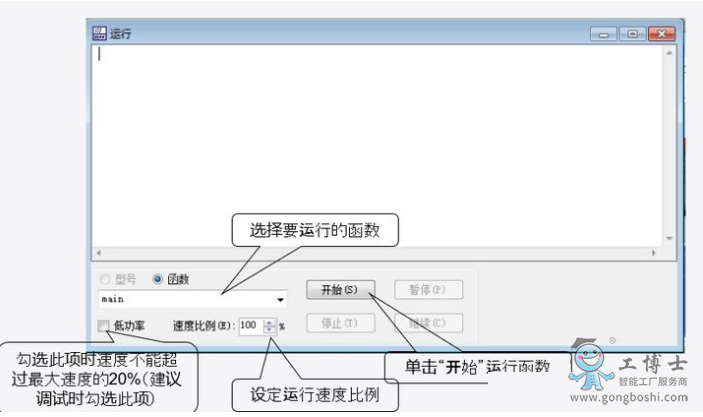
4 运行程序
1)在工具栏上单击打开运行窗口图标“
” ,打开运行窗口
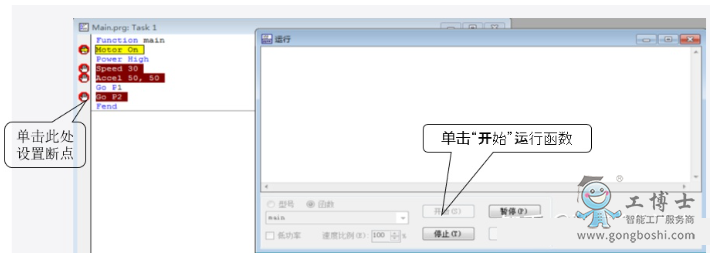
5 单步调试程序
1)单击程序***左端设置断点
2)在工具栏上单击打开运行窗口图标“
” ,打开运行窗口,单击“开始”运行程序
3)按“F11”或单击图标“

” 运行下一行。按“F7”或单击图标“

” 运行到下一个断点。
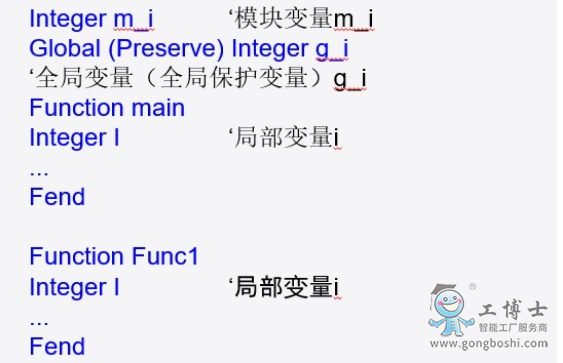
6 局部变量、模块变量及全局变量的定义及区别
1)局部变量:在一个函数内定义的变量,只能在同一函数内使用
2)模块变量:在程序的开头定义,可以在同一个程序里使用
3)全局变量:可以在同一个项目里使用
7 编写一个初始化函数打开马达、设定运行功率及速度(参看程序init_demo)
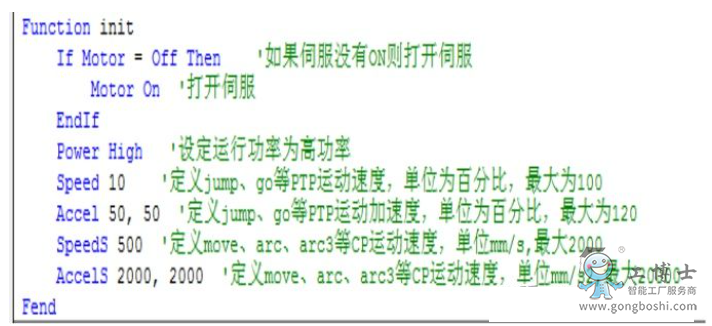 init_demo
init_demo8 用GO、JUMP、MOVE、ARC指令编写一个简单的程序(参看程序move_demo)
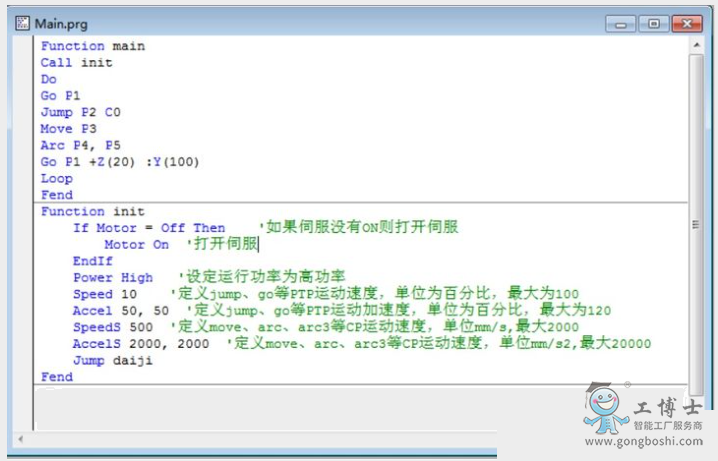 move_demo
move_demo9 编写一个循环控制程序(参看程序xunhuan_demo)
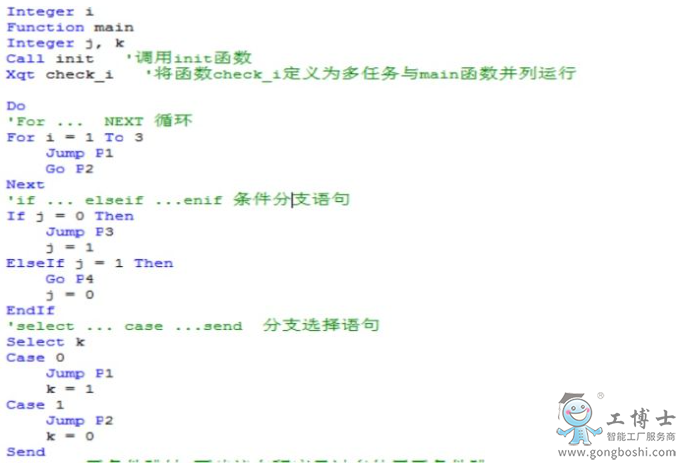 xunhuan_demo1
xunhuan_demo1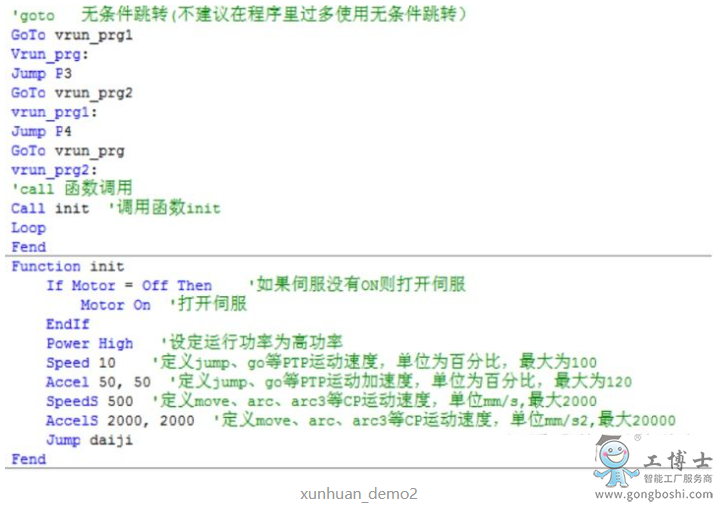 xunhuan_demo2
xunhuan_demo2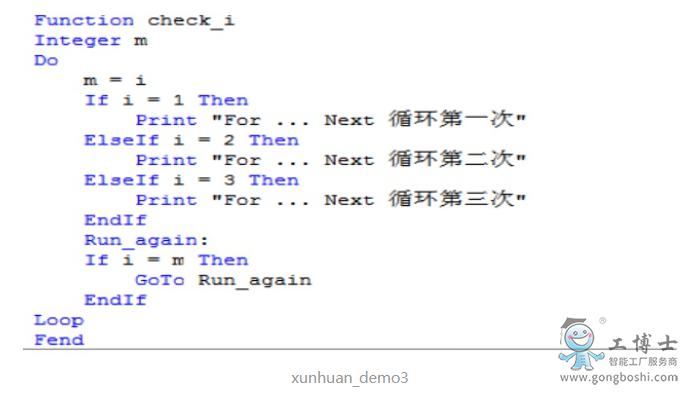 xunhuan_demo3
xunhuan_demo310 编写一个RS232串口通讯程序(参看程序RS232_demo)
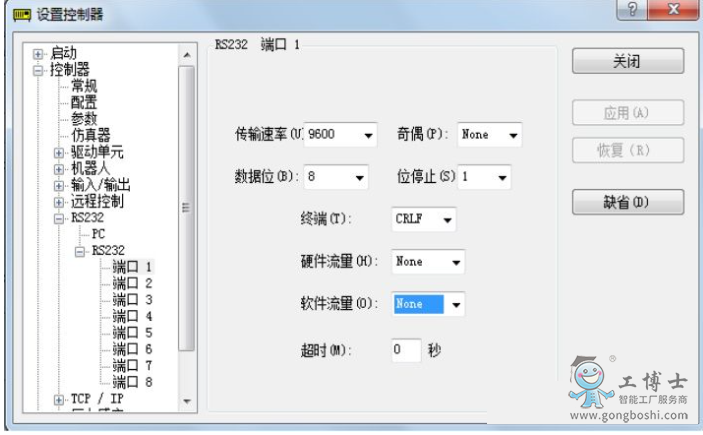
1)串口设置
单击“设置”,选择“系统配置”打开控制器设置画面。单击“RS232”, 选择“端口1”进下图所示串口设置画面,串口通讯参数设置与上位机保持一致,设置好后单击“应用”,然后关闭设置画面
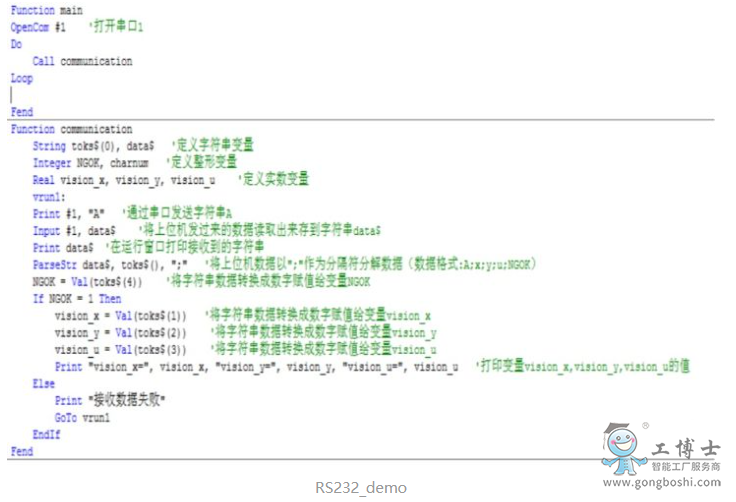 RS232_demo
RS232_demo11 编写一个以太网通讯程序(参看程序internet_demo)
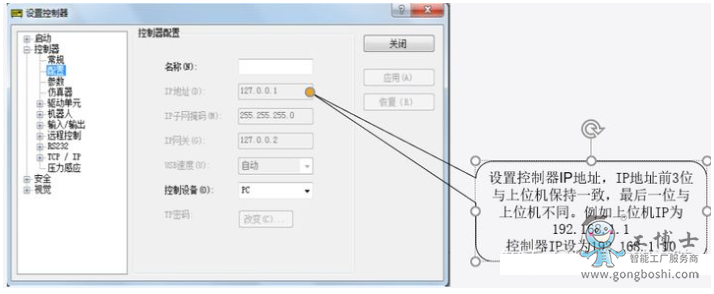
1)控制器IP设置
单击“设置”,选择“系统配置”打开控制器设置画面。单击“配置”, 进入下图所示以太网设置画面,IP地址前3位与上位机保持一致,***后一位与上位机不同。设置好后单击“应用”,然后关闭设置画面
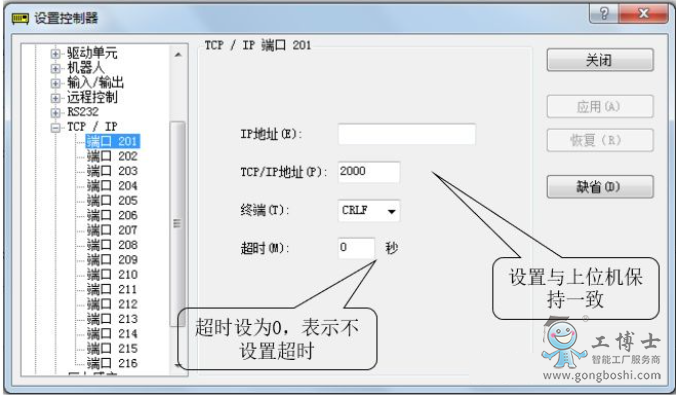
2)以太网端口设置
单击“设置”,选择“系统配置”打开控制器设置画面。单击“TCP/IP”, 选择一个端口号,进入下图所示以太网端口设置画面,IP地址、端口,结束符设置与上位机保持一致。设置好后单击“应用”,然后关闭设置画面
3)以太网通讯程序

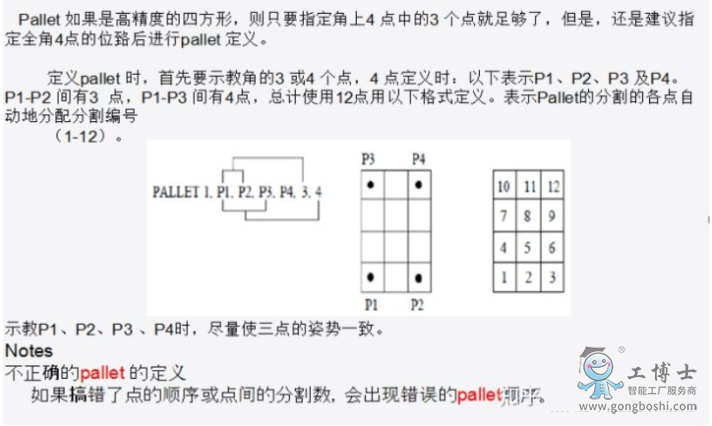
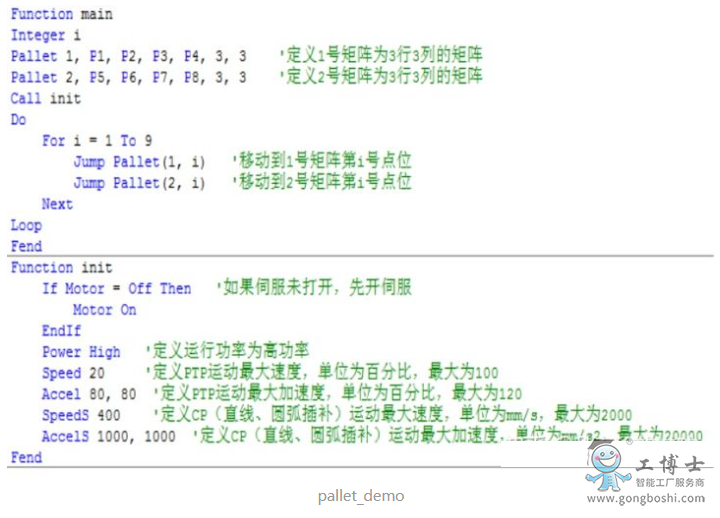
12 矩阵使用程序(参看程序pallet_demo)
1)矩阵定义
13 点文件操作及点位修改
1) 点位定义(一般用示教方式示教点位,直接指定时要注意点的属性,否则运动时容易撞机)
P1 = XY(200, 100, -25, 0) '向点P1分配坐标
Pick = XY(300, 200, -45, 0) '向点pick位置分配坐标
P10 = Here '向当前位置分配某个点
P1=p2 ‘将点P2赋值给P1
2) 用点标签调用点位
For i = 0 To 10
Go pick
Jump place
Next i
3)用变量调用点位
For i = 0 To 10
Go P(i)
Next i
4)上载程序中点文件
启动程序时将加载机器人的默认点文件“robot1.pts”。您还可以使用LoadPoints 语句在程序中加载其他点。
Function main
Integer i
LoadPoints "model1.pts"
For i = 0 To 10
Jump pick
Jump place
Next i
Fend
5) 保存点文件
Function main
P1 = XY(200, 100, -25, 0) '向点P1分配坐标
Pick = XY(300, 200, -45, 0) '向点pick位置分配坐标
Savepoints "robot1.pts" '将点保存到点文件"robot1.pts"
Fend
6)点位属性指定
1、LOCAL属性(指定机器人坐标是相对那个坐标系的位置)
P1 = XY(300, -125.54, -42.3, 0) /1 'P1在本地坐标1中
2、左右手姿势指定
若要为SCARA 或6 轴机器人指定方向,添加斜杠(/),其后是L(左手方向)或R
(右手方向)。
P2 = XY(200, 100, -20, -45) /L ' 手的方向为左
P3 = XY(50, 0, 0, 0) /2 /R ' 本地2为右手方向
您可以使用Hand 语句和函数读取和设置点手的方向。
Hand P1, Righty
3、6轴肘姿势指定
若要在点分配语句中为6 轴机器人指定肘的方向,添加一个斜杠(/),其后是A(上
方肘方向)或B(下方肘方向)
指定P1肘的方向为下方。
P1 = XY (0, 600, 400, 90, 0, 180) /B
14 编写一个回待机位样例程序
在有的应用中由于空间受限,机器人在异常停机后可能处在不确定位置,如果直接用指令回待机位置就有可能撞到其他治具,这时我们必须写一个回初始位置的程序让机器人安全回到待机位。一般我们可以先获取机器人当前姿势以及当前坐标,然后根据当前姿势和当前坐标来决定先移动那个轴或先到那个过渡点,以确保机械手安全回到待机位。(注意回原点时用低功率,避免误操作时速度过快撞坏机器人)
