
 产品:47
产品:47
 联系我们
联系我们

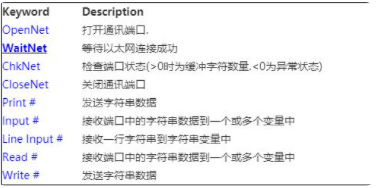
EPSON机器人以太网的通讯指令介绍
设置通讯地址
以太网通讯端口的设置在控制器设置-TCP/IP中.如选择端口201进行通讯,则在201中进行设置.
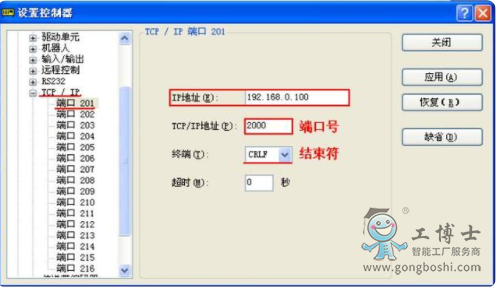
机器人控制器设置IP及端口号
其中IP地址和端口号设置为Server端的IP地址和端口号.(如用机械手控制器作为Server端,则用机械手控制器的IP地址;如果用上位机作为Server端,机械手作为Client端,则设置成上位机的IP地址与端口号)
结束符:表示一行数据结束的标志.CR表示回车符(Asc 13),LF表示换行符(Asc 10).与通讯放设定一致即可.
也可以通过SetNet指令中运行程序时进行设置或者修改:
SetNet #201, "192.168.0.100", 2000, CRLF, NONE, 0
以太网程序范例:
Global String InData$, OutData$ '定义字符串接收和发送的变量
Function task1_TCPIP
SetNet #201, "192.168.0.100", 2000, CRLF, NONE, 0 '设置端口通讯格式.
OpenNet #201 As Client '打开端口
WaitNet #201 '等待端口连接成功
Print "TCPIP Connected."
Do
If ChkNet(201) > 0 Then '检测缓冲区
Input #201, InData$ '接收缓冲区字符
Print #201, InData$ '将接收的数据发送回去--上位机要求的情况
ElseIf ChkNet(201) < 0 Then '缓冲区数值小于0时表示连接异常
Print "通讯断开 = ,", ChkNet(201), " 重新连接..."
CloseNet #201 '关闭端口再重新打开连接。
OpenNet #201 As Client
WaitNet #201
Print "TCPIP Connected."
EndIf
'OutData$不为空时,发送OutData$内容后清空
If OutData$ <> "" Then
Print #201, OutData$
OutData$ = ""
EndIf
Wait 0.02
Loop
Fend

工博士可以提供了ABB,库卡,安川,发那科和欧地希等各种品类的机器人和常用机器人型号,并且包括机器人的配件,保养,维修,培训等等服务我们都可以进行服务,真正做到了为客户进行一站式的服务保障,并且工博士现已经是集九大机器人代理于一体的智能工厂一站式服务商,我们相信,我们真正地在协助第四次工业革命的进步,并为所有涉及机器人技术的人们增加优势和收益!如果您想获得更多信息,请在线留言或致电与我们联系 。
