
 产品:47
产品:47
 联系我们
联系我们

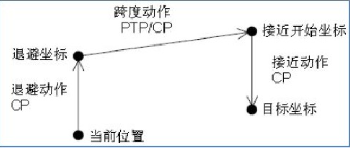
使机械手动作的指令叫作动作指令。可分为: PTP动作指令,CP动作指令,Curves动作指令,Joint动作指令。
1、NOTE:
CP模式,即Continuous Path连续路径模式。指定PTP动作指令和Joint动作指令的速度和加/减速度时,使用SPEED指令和ACCEL指令。指定CP模式动作指令时,使用使用SPEEDS指令和ACCELS指令。
1、NOTE:
CP模式,即Continuous Path连续路径模式。指定PTP动作指令和Joint动作指令的速度和加/减速度时,使用SPEED指令和ACCEL指令。指定CP模式动作指令时,使用使用SPEEDS指令和ACCELS指令。

2.、PTP指令:
包括指令: Go、Jump、BGo、TGoPTP (Pose To Pose)动作,是与其动作轨迹无关,以机械手的工具顶端为目标位路使其动作的动作方法。PTP动作,使用各关节上配置的电动机,使机械手通过*短的路径到达目标位置。优点:运动速度快,缺点:运动轨迹无法预测。指定PTP动作速度和加/减速,使用SPEED指令和ACCEL指令。2.1 Go指令功能:全轴同时的PTP动作,动作的轨迹是各关节分别对从当前的点到目标坐标进行插补。格式: Go目标坐标。
示例:
1. GoP1机械手动作到P1点
2. Go XY(50, 400, 0, 0)”机械手动作到X=50, Y=400, z=0, U=0
3.GoP1+X(50)'机械手动作到P1点X坐标值偏移量为+50的位置
4. Go P1:X(50)’机械手 动作到P1点对应X坐标值为50的位置
2.2 Jump指令
功能:通过“门形动作”使手臂手臂从当前位珞移动至目标坐标。
格式: Jump目标坐标
NOTE:
Go与Jump的区别Jump与Go都是使机械手手臂用PTP动作移动的命令。但是Jump有Go没有的一个功能。Jump将机械手的手部先抬起至LimZ值,然后使手臂水平移动,快要到目标坐标上空的时候使其下降移动。此动作的标准是可以更准确地避开障碍物这一点,更重要的是通过吸附、配置动作,提高作业的周期时间。
1、 CP指令
包括指令: Move、Arc、Arc3、Jump3/Jump3CP、BMove、TMove、CVMoveCP (Continuous Path )指令可以指定机械手到达目标位置的运动轨迹。优点:轨迹可以控制,匀速动作。缺点:速度慢。指定直线动作速度和加/减速度,使用Speeds指令和Accels指令。
2、 Move指令
功能:以直线轨迹将机械手从当前位置移动到指定目标位置。全关节同时启动,同时停止。格式:Move目标坐标示例:MoveP1 °机械手 以直线轨迹动作到P1点
Move与Go的区别到达目标点时的手臂的姿势重要的时候使用Go命令,但是比控制动作中的手臂的轨迹重要的时候,使用Move 命令。在SCARA机械手只有Z轴上下动作时,
Go与Move的轨迹一样。
包括指令: Go、Jump、BGo、TGoPTP (Pose To Pose)动作,是与其动作轨迹无关,以机械手的工具顶端为目标位路使其动作的动作方法。PTP动作,使用各关节上配置的电动机,使机械手通过*短的路径到达目标位置。优点:运动速度快,缺点:运动轨迹无法预测。指定PTP动作速度和加/减速,使用SPEED指令和ACCEL指令。2.1 Go指令功能:全轴同时的PTP动作,动作的轨迹是各关节分别对从当前的点到目标坐标进行插补。格式: Go目标坐标。
示例:
1. GoP1机械手动作到P1点
2. Go XY(50, 400, 0, 0)”机械手动作到X=50, Y=400, z=0, U=0
3.GoP1+X(50)'机械手动作到P1点X坐标值偏移量为+50的位置
4. Go P1:X(50)’机械手 动作到P1点对应X坐标值为50的位置
2.2 Jump指令
功能:通过“门形动作”使手臂手臂从当前位珞移动至目标坐标。
格式: Jump目标坐标
NOTE:
Go与Jump的区别Jump与Go都是使机械手手臂用PTP动作移动的命令。但是Jump有Go没有的一个功能。Jump将机械手的手部先抬起至LimZ值,然后使手臂水平移动,快要到目标坐标上空的时候使其下降移动。此动作的标准是可以更准确地避开障碍物这一点,更重要的是通过吸附、配置动作,提高作业的周期时间。
1、 CP指令
包括指令: Move、Arc、Arc3、Jump3/Jump3CP、BMove、TMove、CVMoveCP (Continuous Path )指令可以指定机械手到达目标位置的运动轨迹。优点:轨迹可以控制,匀速动作。缺点:速度慢。指定直线动作速度和加/减速度,使用Speeds指令和Accels指令。
2、 Move指令
功能:以直线轨迹将机械手从当前位置移动到指定目标位置。全关节同时启动,同时停止。格式:Move目标坐标示例:MoveP1 °机械手 以直线轨迹动作到P1点
Move与Go的区别到达目标点时的手臂的姿势重要的时候使用Go命令,但是比控制动作中的手臂的轨迹重要的时候,使用Move 命令。在SCARA机械手只有Z轴上下动作时,
Go与Move的轨迹一样。
NOTE:
1、Jump不能用于6轴机械手,6轴机械手只能使用Jump3和Jump3 CP指令
2、Jump3CP指令用法与Jump3类似,不同在于Jump3CP是3个CP动作的组合
3、SCARA机械手Z轴上升或下降动作时,使用Jump指令可以提高运动速度
4、 BMove、TMove、 CVMove指令BMove在指定的局部坐标系(Local). 上执行偏移 直线插补动作。没有指定局部坐标系时,以局部0 (基准坐标系)为基准,进行进行偏移PTP动作。TMove在当前的工具坐标系上执行偏移直线插补动作。
3输入指令
3.1 Wait功能:时间等待或输入位等待,格式: Wait时间
Wait输入条件,[时间]时间:0~2147483,*小有效位为0.01秒;输入条件:记述待机条件
说明:只指定时间时,指定时间待机后执行下一一个命令。只指定输入条件式时,待机至条件成立。指定输入条件与时间时,条件式成立或指定时间到都会执行下一个命令。使用Sw函数,可以确认输入条件式是否成立,或指定时间是否已到。
示例: Wait 1 .5待机1.5秒后,继续执行程序Wait Sw (3) =On待机直到输入位3开启
3.2 Sw函数功能:返回指定的输入位状态格式: Sw (输入位编号)输入位编号:可以使用的输入位编号
说明:进行I/O输入的状态确认。指定的输入打开时返回「1」,关闭时返回「0」。示例: Print Sw(3)
‘打印输入位3的状态
Wait Sw(1)=On and Sw(2)=On‘待 机直到输入位1和2开启Wait Sw(1)=On or Sw(2)=On待 机直到输入位1或2开启
更多详情:爱普生机器人