产品:47
产品:47
 联系我们
联系我们

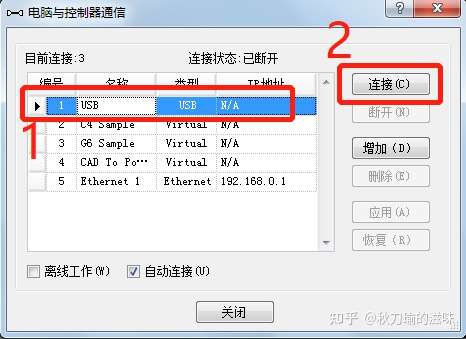
1、通过USB连接控制器
1)单击工具栏图标“ ” 或者单击“设置”,单击“控制器与电脑通讯”,进入如下画面。选择“USB”,单击“连接”即可连接控制器。控制器连接上后,连接状态会变为“已连接”
1.2 通过以太网连接控制器(使用以太网连接时用)
(1)单击“设置” “电脑与控制器通讯”进入IP设置画面,或者单击工具栏图
标“ ”进入IP设置画面 ,然后单击“增加”进入右下图画面选择“通
过以太网连接到控制器”单击确定
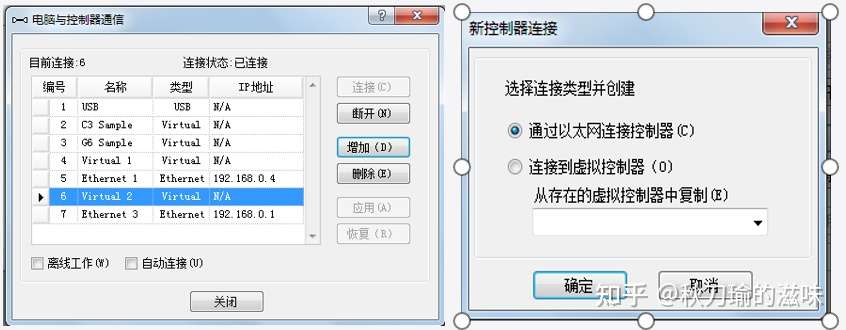
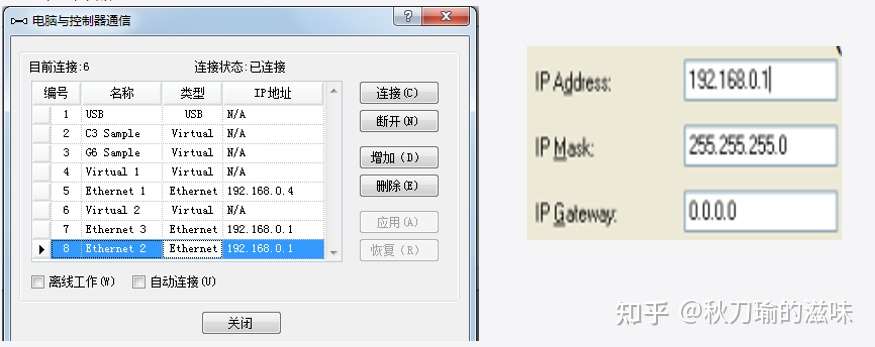
(2)设置新增以太网连接名称及IP地址 ,控制器出厂默认控制器IP设置如右下图所示
设置好IP后单击应用,如果控制器IP忘记了,可以先用USB线连接控制器然后在
“设置”|控制器|configuration里可以查看控制器IP,电脑IP的前三位要与控制
器的前三位相同,例如“192.168.0.10” 。设置好IP地址后单击“连接”连接
控制器 。
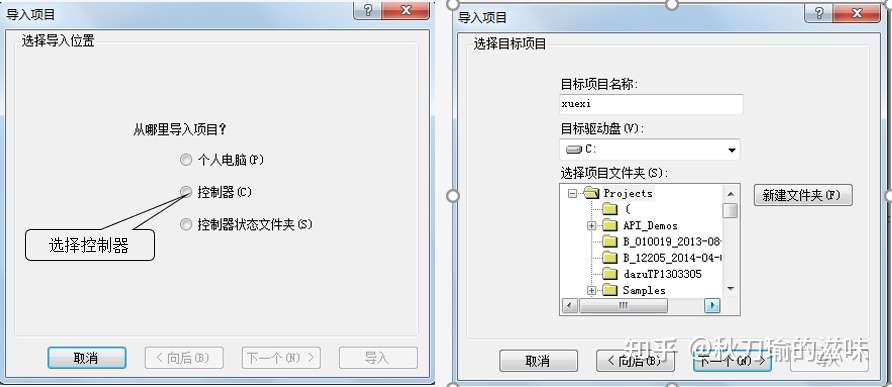
1.3 从控制器读取程序
1)连接控制器后,单击“项目”,单击“导入”进入下图所示画面,选择
“控制器”,单击“下一个”,再单击“下一个”,单击“导入”即可
将控制器的程序读取出来
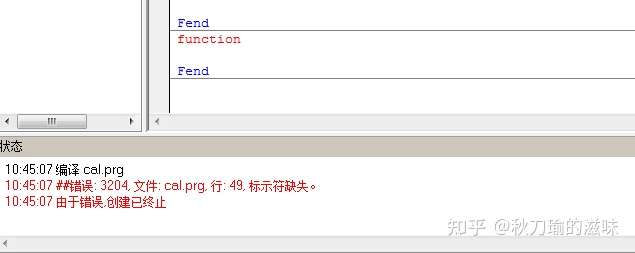
1.4 将程序下载到控制器
1)在工具栏上单击创建并下载程序图标“

”或者单击打开运行窗口图标
“

” ,软件即会编译程序,如果程序没有错误就会将程序下载到控
制器。如果程序有错误,状态栏会显示程序错误信息,如下图所示。将光
标移到错误信息一栏,双击左键光标即会跳到程序错误的那一行去,然后
修改程序后重新下载程序
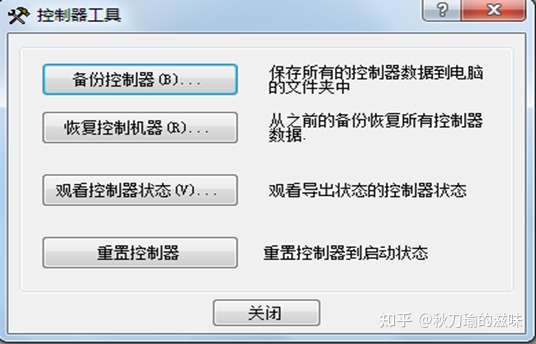
1.5 控制器参数备份及恢复
1)控制器备份
单击“工具”,选择“控制器”进入下图画面,单击“备份控制器”,选择一个文
夹(如果不选择的话备份文件会存储到软件安装文件夹EpsonRC70下的Backup文件
夹里面。),然后单击“确定”
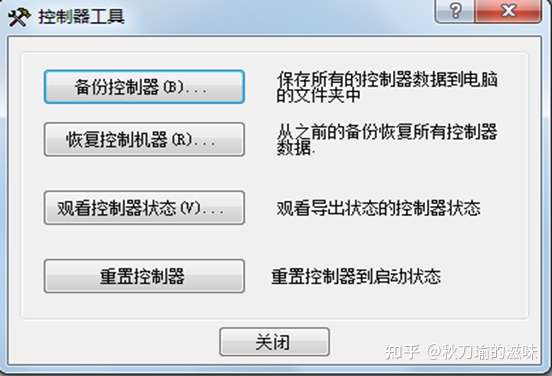
2)控制器恢复
单击“工具”,选择“控制器”进入下图画面,单击“恢复控制器”,选择之前备
份的文件,然后单击“确定”。(不能将不同控制器版本的备份文件恢复到控制
器,例如将RC90控制器的备份文件恢复到RC90 700控制器)
1.6.1 设置控制器参数
1)设置控制器IP地址
单击“设置”,选择“系统配置”进入左下图画面。单击“控制器”选择“配置”
进入右下图画面。设置好控制器IP地址后,单击“应用”,单击“关闭”,如果提
示重置控制器,单击“确定”
2)修改I/O设置
单击“设置”,选择“系统配置”,单击“控制器”,选择“远程控制”
进入下图画面。如果将专用输入输出设置为“空闲”即可将专用输入输出改为普通
输入输出。也可以把其他端口号改为专用输入输出。单击“缺省”可以恢复初始设
置。修改好后,单击“应用”,单击“关闭”,提示重启控制器,单击“确定”

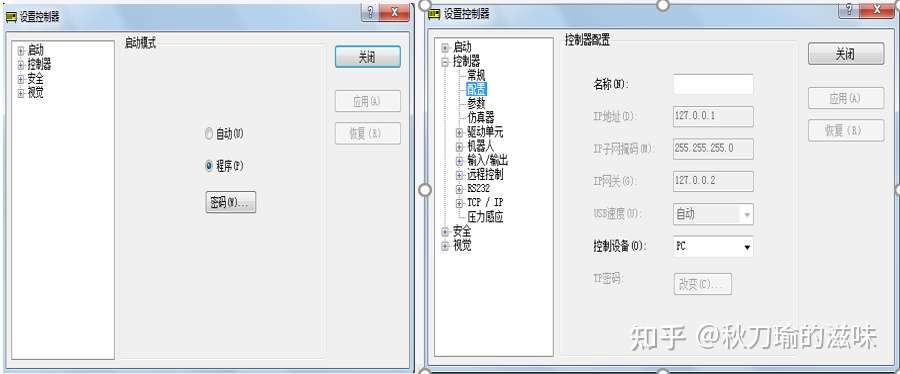
1.7 设置控制器远程控制模式
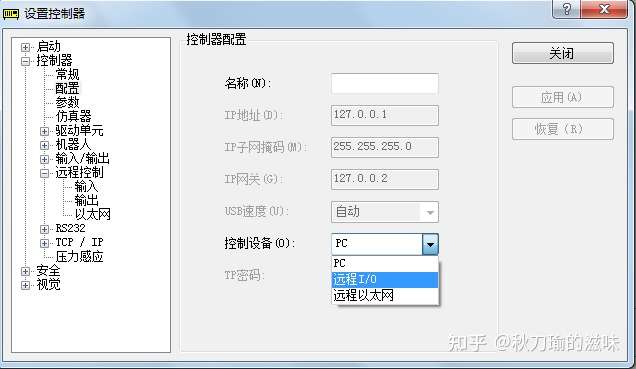
单击“设置”,选择“系统配置”进入左下图画面。单击“控制器”选择“配置”
进入下图画面。将控制器设备改为“远程I/O”或者“远程以太网”,单击“应用”,
单击“关闭”,如果提示重置控制器,单击“确定”
1.8 重置控制器
单击“工具”,选择“控制器”进入左下图画面。单击“重置控制器”
2.1 伺服马达打开、释放和重置
单击“工具”,选择“机器人管理器”,单击“控制面板”进入左下图画面。或者
单击工具栏图标“

”,然后单击“控制面板”。

2.2 点位示教
2.2.1 打开步进示教画面
工具→机器人管理器 →步进示教 或单击工具栏 图标后,选择“步进示教”页面。如下图示
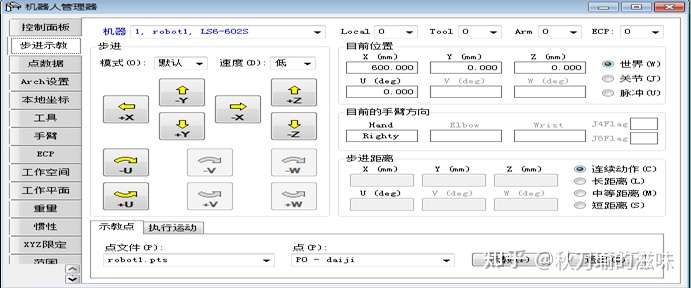
模式说明:
默认:在当前的局部坐标系、工具坐标系、机械手属性、ECP坐标系上,向X、Y、Z轴的方向微动动作。如果是SCARA型机械手,也可以向U方向微动。如果是垂直6轴型机械手,则可以向U方向(倾斜)、V方向(仰卧)、W方向(偏转)微动。
工具 : 向工具定义的坐标系的方向微动移动。
Local: 向定义的局部坐标系的方向微动移动。
关节 : 各机械手的关节单独微动移动。不是直角坐标型的机械手使用Joint模式时,显示单独的微动按钮。
ECP : 在用当前的外部控制点定义的坐标系上,微动动作。
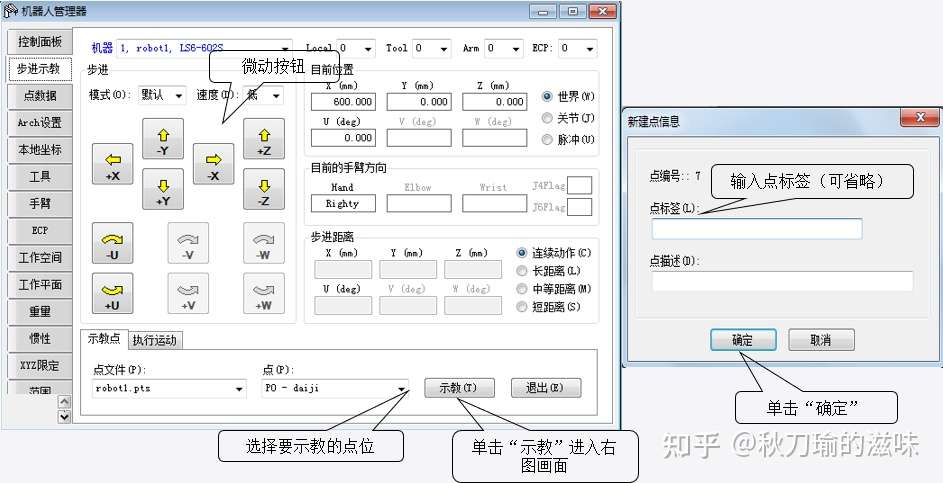
2.2.2 点位示教步骤
1) 单击“示教点”,选择要示教的点文件

2) 微动将机械手移动的需要示教点的位置。如果是SCARA机械手,Motor On情况下,可以在“控制面板”页面,单击“释放所有”释放所有轴后,手动将机械手移动需要示教点的位置后,单击“锁定所有”锁定所有轴。选择要示教的点位,单击“示教”
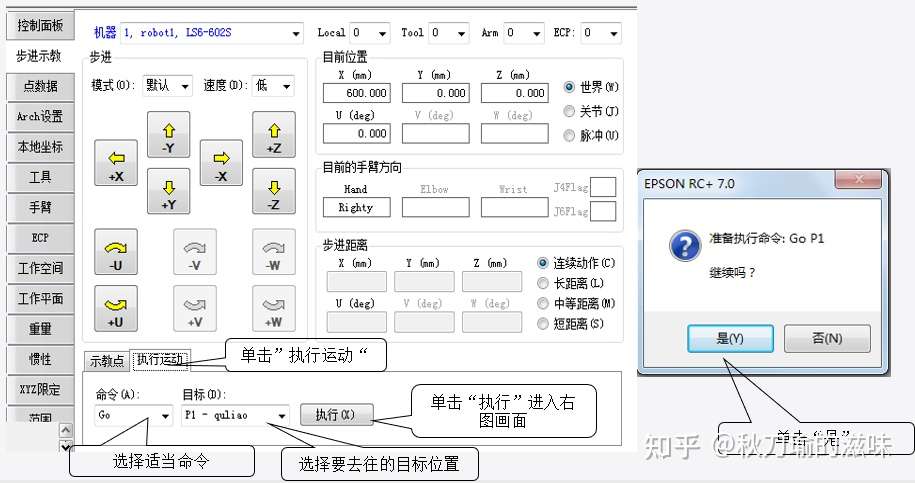
2.3 点位追踪
1) 单击“执行运动”,选择合适追踪命令及目标位置,单击“执行”,单击“是”,机械手即会去往目标位置。
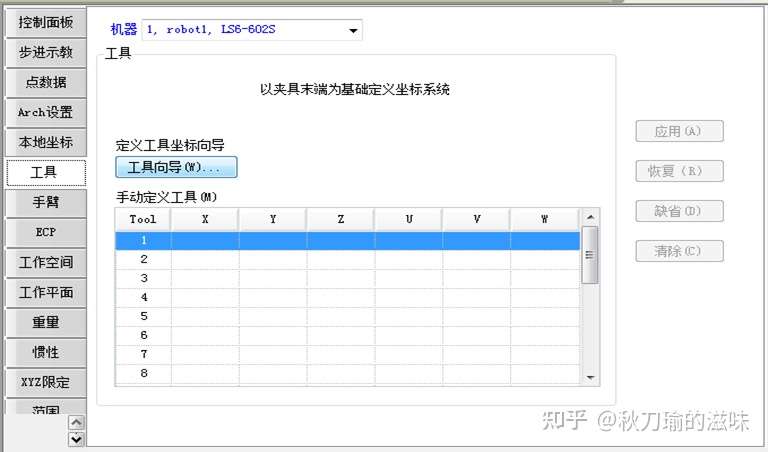
2.4 工具坐标示教
1) 在机器人管理界面单击“工具”打开工具坐标向导画面
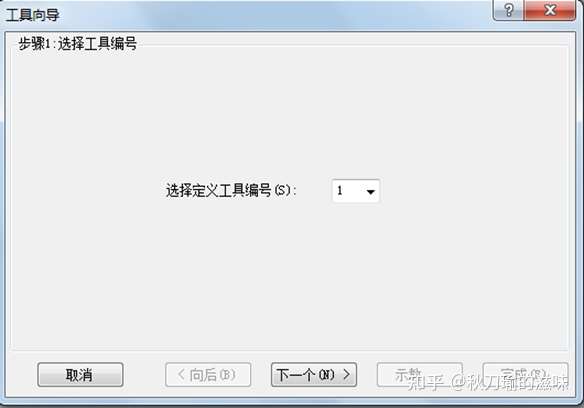
2) 在“工具”画面单击“工具向导”,进入工具向导画面,选择移动向下工具编号,如下图所示:
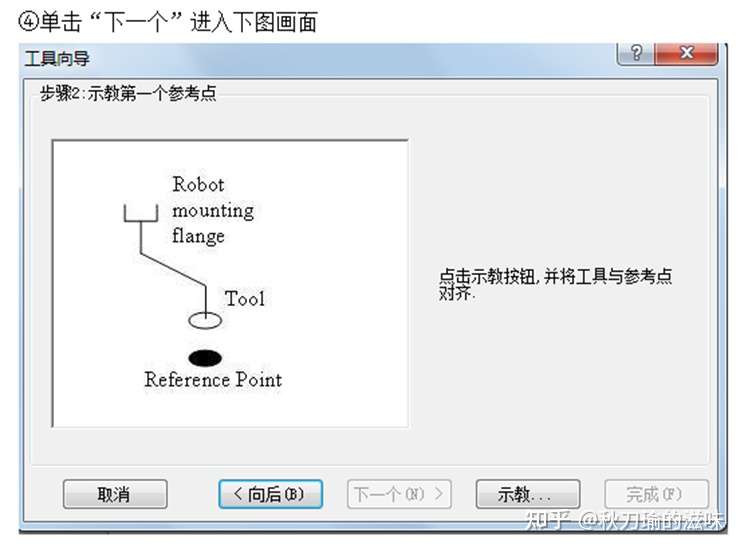
⑤单击“示教”进入下图画面,移动X、Y使治具末端对准一个MARK点,确保U=0。

⑥对准MARK后单击“示教”,进入如下画面
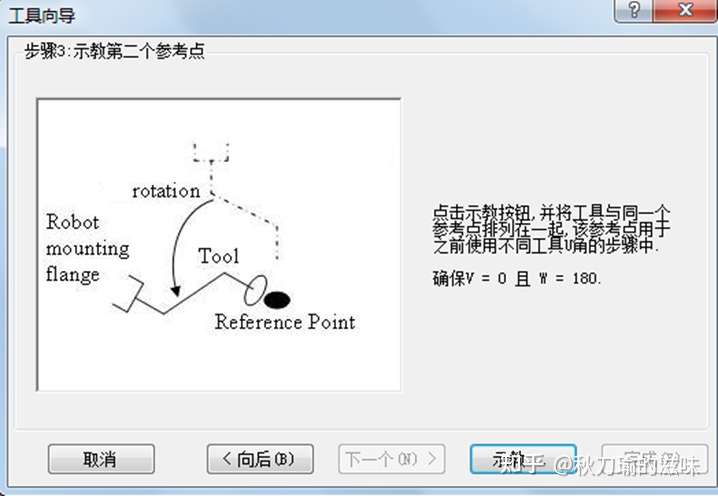
⑦单击“示教”进入如下画面,使U=180,Z保持不变,然后移动X、Y,使治具末端再次对准MARK

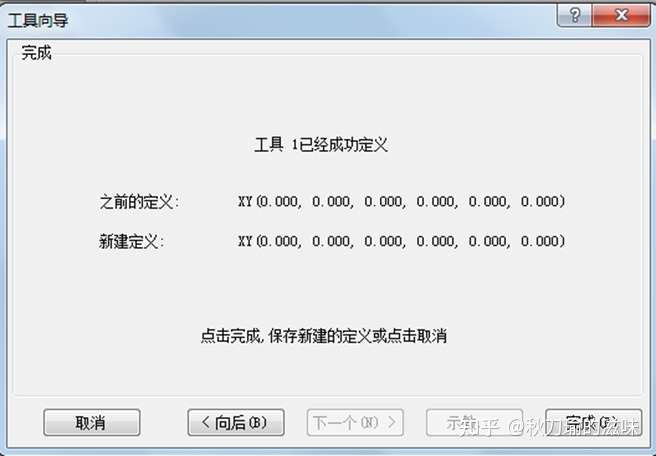
⑧对准MARK点后单击“示教”,进入如下画面,单击“完成”。
2.5 LOCAL坐标示教
2.5.1 用一个原点方式示教本地坐标
1) 在机器人管理界面单击“本地坐标”打开LOCAL坐标向导画面
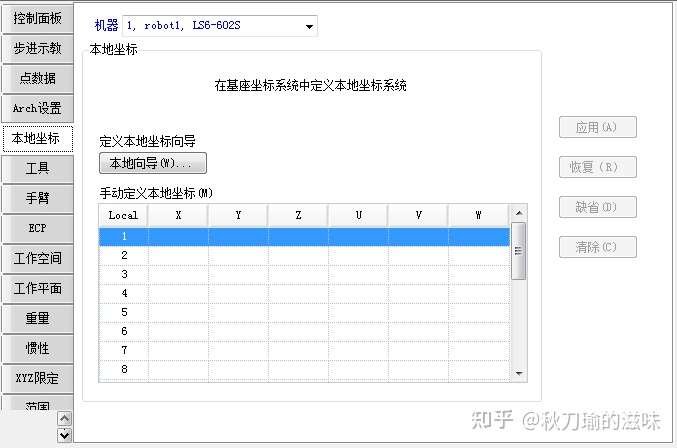
2) 单击“本地向导”打开LOCAL坐标向导画面
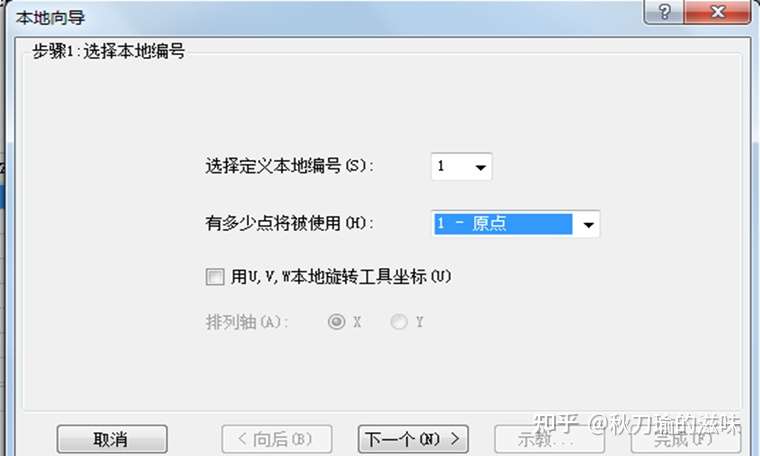
3) 选择您想定义的本地号码。对于[有多少点将被使用],则选择[1–原点]。由于这是一个本地单点,您只需示教新坐标系的原点即可。如果您想使用坐标系方向的U,V 或W 轴,勾选[用U,V,W 本地旋转工具坐标]复选框。如果未选中此复选框,新的坐标系是从X 和Y 轴的本Local 0 进行偏移,但不会绕着轴旋转。
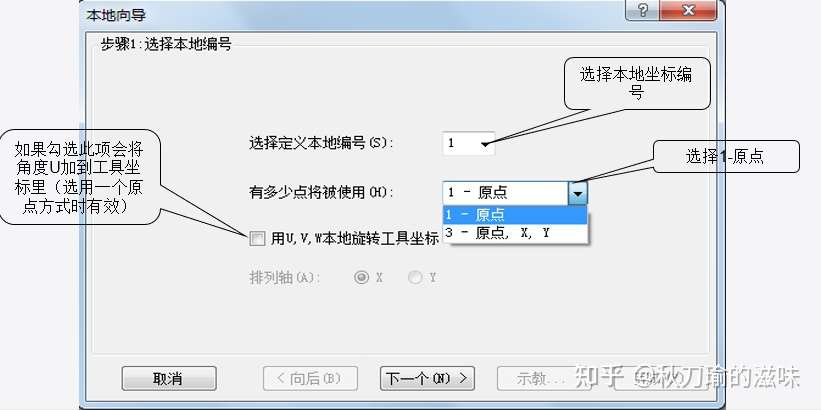
4) 选好本地坐标编号和示教方式后,单击“下一个”,进入下图画面
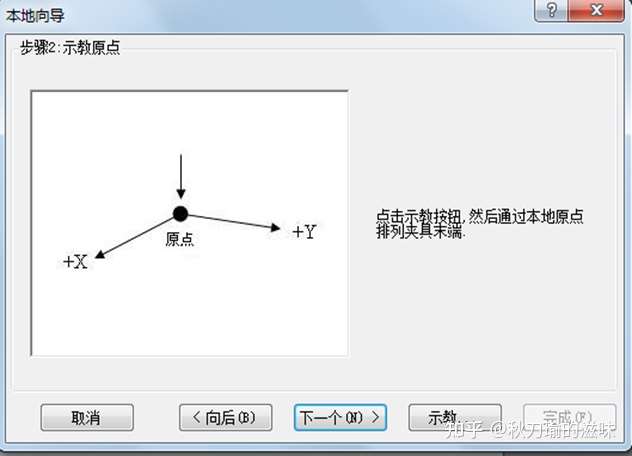
5) 单击“示教”,进入下图示教画面,移动X、Y使治具末端对准本地坐标原点

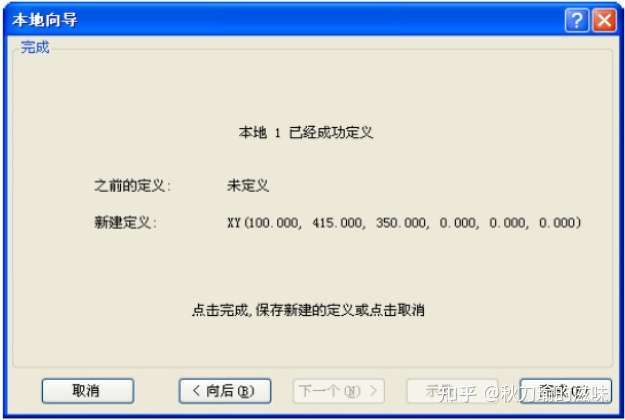
6) 单击“示教”,新的Local 定义如下所示。单击“完成”保存新的定义
2.5.2 用三个点示教本地坐标
1) 在机器人管理界面单击“本地坐标”打开LOCAL坐标向导画面
2)单击“本地向导”按钮。打开如下所示的对话框。
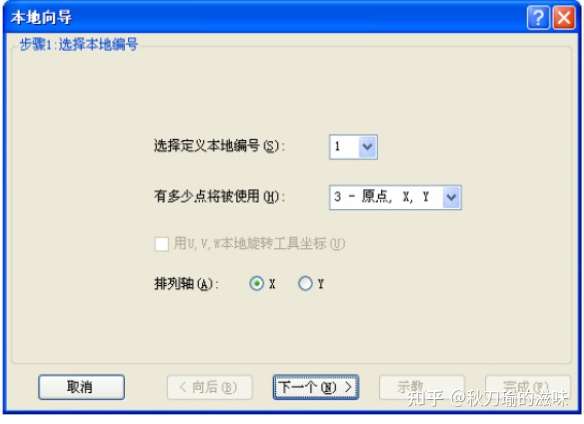
3) 选择您想定义的本地号码。对于[有多少点将被使用],则选择[3 – 原点, X, Y]。由于这是个本地三点,您会示教新坐标系的原点,然后示教沿X 轴任何位置的一个点和沿Y 轴任何位置的一个点。选择将用于对齐坐标系的轴。例如,如果您选择了X,然后新坐标系的X 轴会对齐您将在后面步骤中进行示教的X 轴点。Y 轴点将用于确定倾斜。
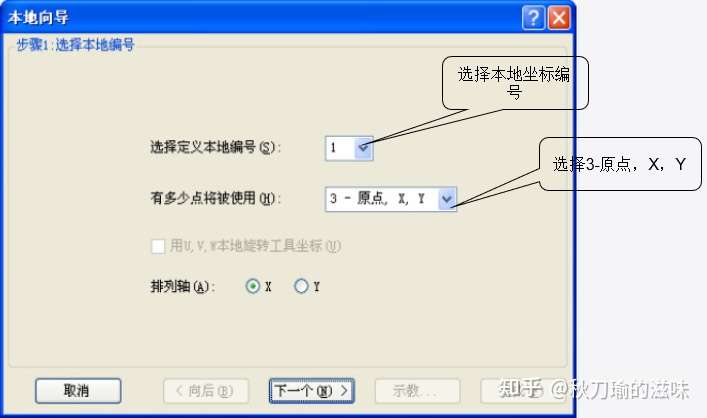
4) 选好本地坐标编号和示教方式后,单击“下一个”,进入下图画面
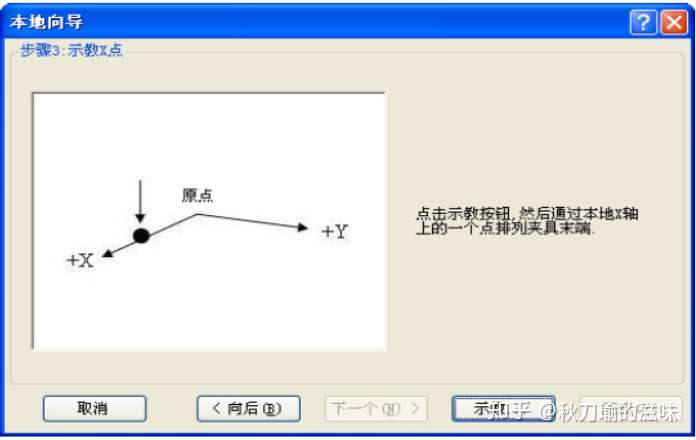
5) 单击“示教”,进入下图示教画面,移动X、Y使治具末端对准本地坐标原点
6) 单击“示教”,进入示教画面,移动X、Y使治具末端对准本地坐标X轴上一个点
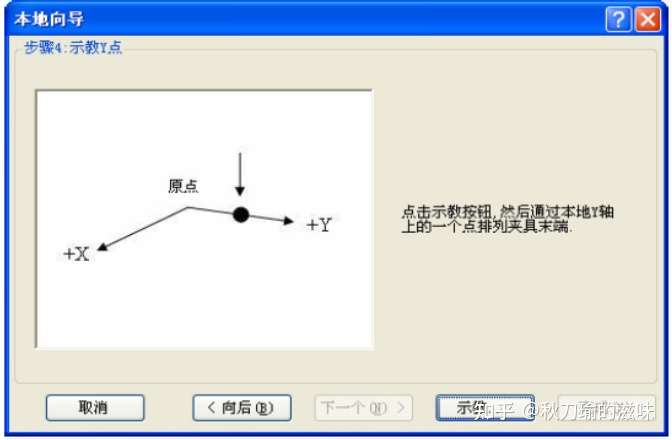
6) 单击“示教”,进入示教画面,移动X、Y使治具末端对准本地坐标Y轴上一个点
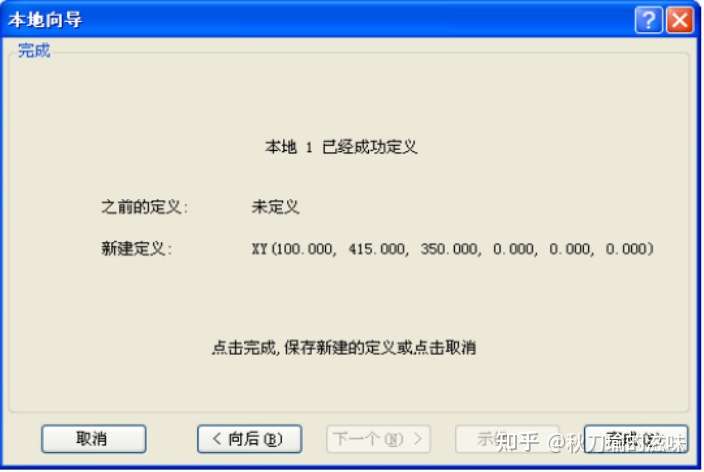
6) 单击“示教”,新的Local 定义如下所示。单击“完成”保存新的定义。
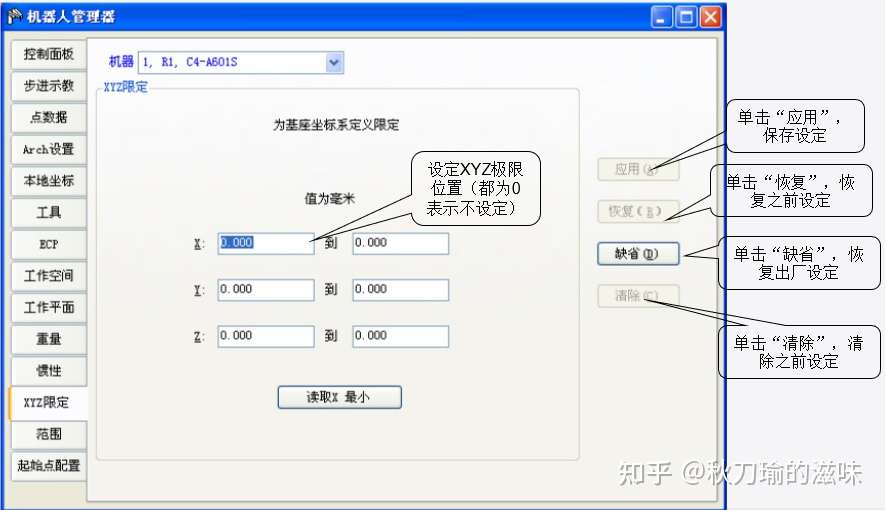
2.6 设置XYZ极限
1) 在机器人管理界面单击“XYZ限定”,打开XYZ设定画面
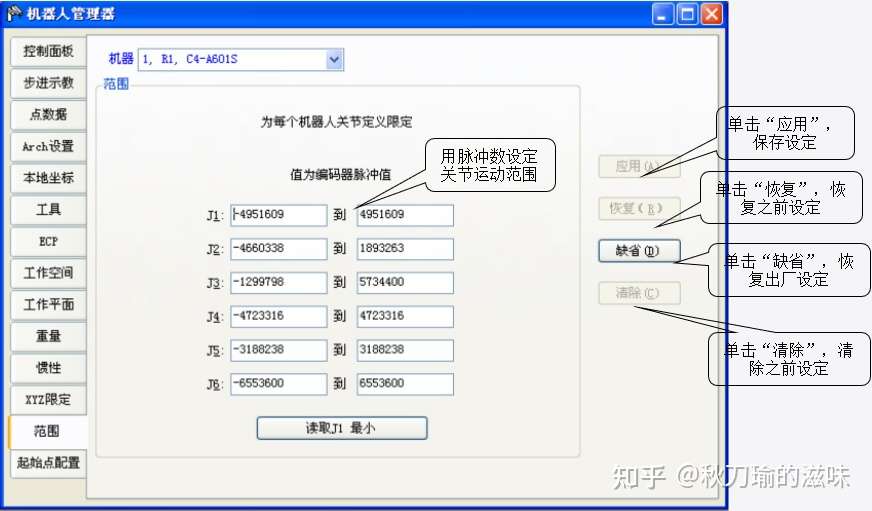
2.7 设置关节运动范围(用脉冲数指定)
1) 在机器人管理界面单击“范围”,打开关节运动范围设定画面
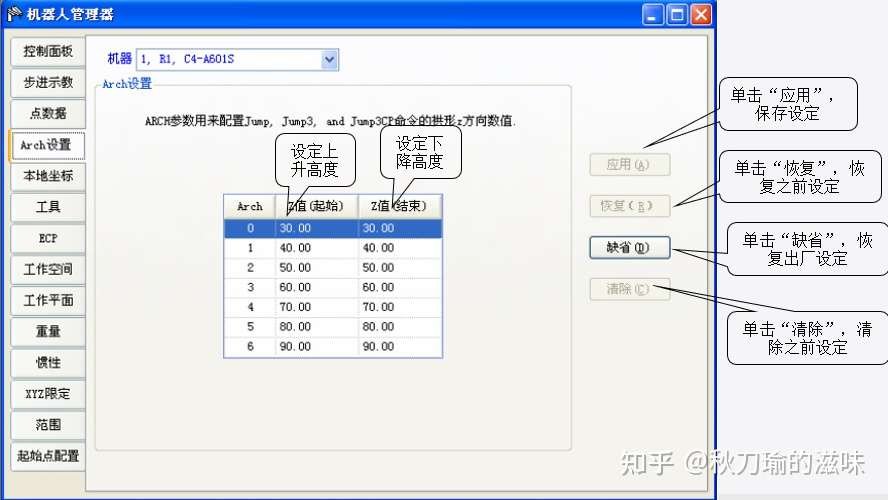
2.8 设定设JUMP指令上升高度和下降高度
1) 在机器人管理界面单击“范围”,打开Arch设定画面